Character 'H' = 01001000
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STO 1000 1 000 10001000 88 Store RR > OR bit-0 [0]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STO 1000 1 010 10001010 8A Store RR > OR bit-2 [0]
STOC 1001 1 011 10011011 9B Store /RR > OR bit-3 [1]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STO 1000 1 101 10001101 8D Store RR > OR bit-5 [0]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
Character 'e' = 01100101
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STOC 1001 1 000 10011000 98 Store /RR > OR bit-0 [1]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STOC 1001 1 010 10011010 9A Store /RR > OR bit-2 [1]
STO 1000 1 011 10001011 8B Store RR > OR bit-3 [0]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
Character 'l' = 01101100
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STO 1000 1 000 10001000 88 Store RR > OR bit-0 [0]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STOC 1001 1 010 10011010 9A Store /RR > OR bit-2 [1]
STOC 1001 1 011 10011011 9B Store /RR > OR bit-3 [1]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
Character 'l' = 01101100
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STO 1000 1 000 10001000 88 Store RR > OR bit-0 [0]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STOC 1001 1 010 10011010 9A Store /RR > OR bit-2 [1]
STOC 1001 1 011 10011011 9B Store /RR > OR bit-3 [1]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
o = 01101111
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STOC 1001 1 000 10011000 98 Store /RR > OR bit-0 [1]
STOC 1001 1 001 10011001 99 Store /RR > OR bit-1 [1]
STOC 1001 1 010 10011010 9A Store /RR > OR bit-2 [1]
STOC 1001 1 011 10011011 9B Store /RR > OR bit-3 [1]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
r = 01110010
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STO 1000 1 000 10001000 88 Store RR > OR bit-0 [0]
STOC 1001 1 001 10011001 99 Store /RR > OR bit-1 [1]
STO 1000 1 010 10001010 8A Store RR > OR bit-2 [0]
STO 1000 1 011 10001011 8B Store RR > OR bit-3 [0]
STOC 1001 1 100 10011100 9C Store /RR > OR bit-4 [1]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
l = 01101100
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STO 1000 1 000 10001000 88 Store RR > OR bit-0 [0]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STOC 1001 1 010 10011010 9A Store /RR > OR bit-2 [1]
STOC 1001 1 011 10011011 9B Store /RR > OR bit-3 [1]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
d = 01100100
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STO 1000 1 000 10001000 88 Store RR > OR bit-0 [0]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STOC 1001 1 010 10011010 9A Store /RR > OR bit-2 [1]
STO 1000 1 011 10001011 8B Store RR > OR bit-3 [0]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STOC 1001 1 110 10011110 9E Store /RR > OR bit-6 [1]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
! = 00100001
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STOC 1001 1 000 10011000 98 Store /RR > OR bit-0 [1]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STO 1000 1 010 10001010 8A Store RR > OR bit-2 [0]
STO 1000 1 011 10001011 8B Store RR > OR bit-3 [0]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STOC 1001 1 101 10011101 9D Store /RR > OR bit-5 [1]
STO 1000 1 110 10001110 8E Store RR > OR bit-6 [0]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
C/R = 00001101
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STOC 1001 1 000 10011000 98 Store /RR > OR bit-0 [1]
STO 1000 1 001 10001001 89 Store RR > OR bit-1 [0]
STOC 1001 1 010 10011010 9A Store /RR > OR bit-2 [1]
STOC 1001 1 011 10011011 9B Store /RR > OR bit-3 [1]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STO 1000 1 101 10001101 8D Store RR > OR bit-5 [0]
STO 1000 1 110 10001110 8E Store RR > OR bit-6 [0]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
L/F = 00001010
LD 0001 1 001 00011001 19 Load value on IR bit-1 > RR [0]
STO 1000 1 000 10001000 88 Store RR > OR bit-0 [0]
STOC 1001 1 001 10011001 99 Store /RR > OR bit-1 [1]
STO 1000 1 010 10001010 8A Store RR > OR bit-2 [0]
STOC 1001 1 011 10011011 9B Store /RR > OR bit-3 [1]
STO 1000 1 100 10001100 8C Store RR > OR bit-4 [0]
STO 1000 1 101 10001101 8D Store RR > OR bit-5 [0]
STO 1000 1 110 10001110 8E Store RR > OR bit-6 [0]
STOC 1001 1 111 10011111 9F Store /RR > OR bit-7 [0>1] {strobe pulse}
STO 1000 1 111 10001111 8F Store RR > OR bit-7 [1>0]
JMP 1100 1 000 11001000 C8 JMP FLAG goes HIGH > trigger a restart
========================================================================
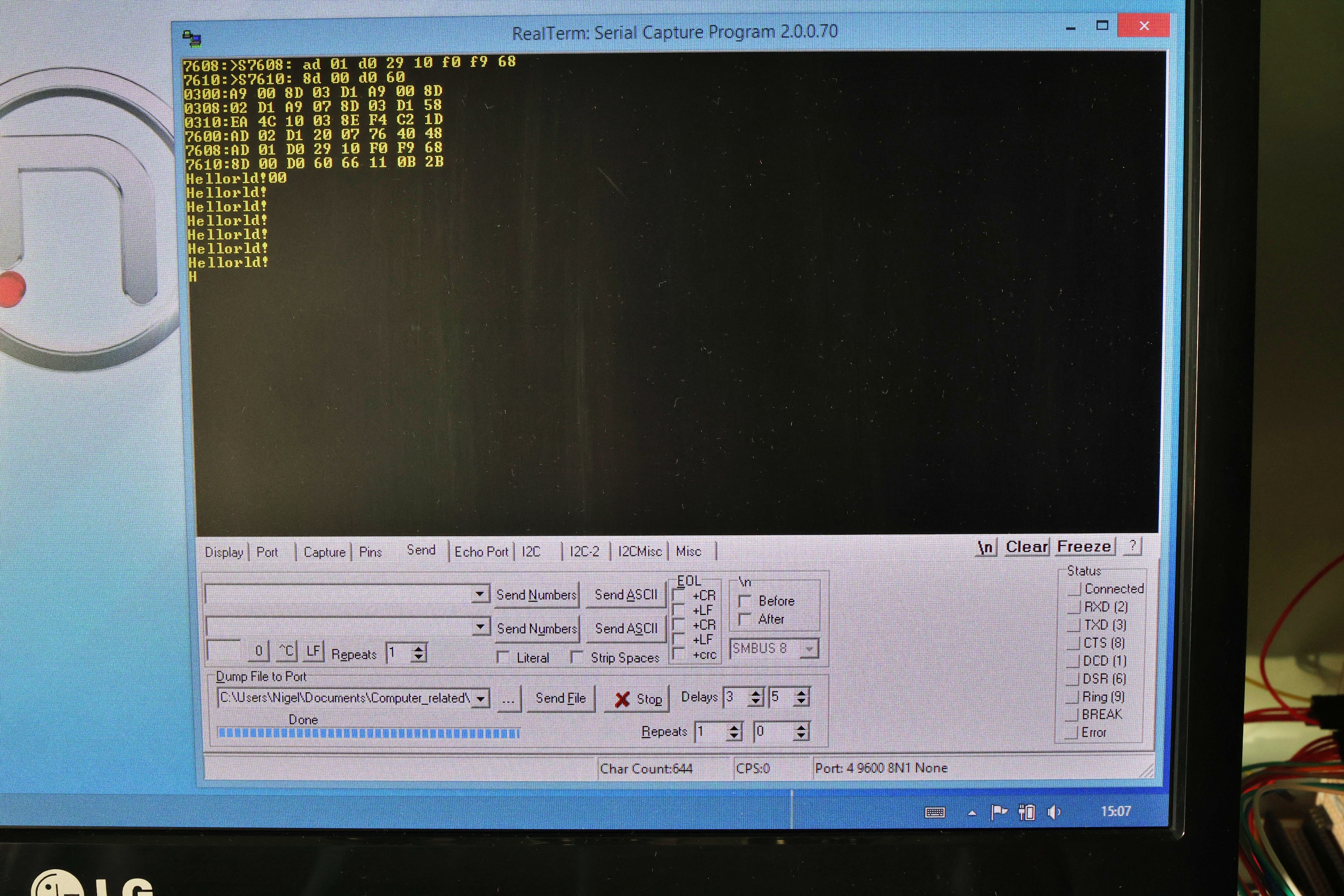
6502 Assembler Listing
; 6502 assembler to configure 6821 PIA, reading input data on an IRQ.
; Send to serial o/p. Run the routine code from within the machine monitor.
; When /IRQ occurs, 6502 reads from the 6821 and writes to the 6551 ACIA.
; The ACIA is already setup as part of the monitor code.
;
; IRQ Vector address $7FFD stored in EEPROM. $7FFD holds a JMP instruction
; to a configurable address (default $7600)
; The ISR start address $7600 is stored in $7FFE ($00) & $7FFF ($76).
; /IRQ Interrupt Service Routine, resides in SRAM - start address $7600.
; Top of SRAM = $7FFF
.target "6502" ; running a 6502 processor
.code
; Hardware I/O Locations
; ACIA 0
ACIA0_Data = $D000
ACIA0_Status = $D001
; PIA-Port-B
PIAB_Data = $D102
PIAB_Control = $D103
; Main code start address
* = $0300
Start
; Configure Port B all Inputs, CB1 /IRQ active, Low to High triggers /IRQ.
; PIA-Port-B
; PIAB_Data = $D102
; PIAB_Control = $D103
;
InitPIAB
LDA #$00 ; Configure the Control Register
; Set bit 0 with '0' this keeps IRQ disabled during setup.
; Set bit 2 with '0' to access DDR on $D102
STA PIAB_Control ; Store in $D103 to access Data Direction Reg. B
;
LDA #$00 ; Configure Data Direction Register - Set bits 0-7 to determine which pins/bits are
; inputs or outputs
STA PIAB_Data ; Set all bits as inputs ['0' for Input, '1' for Output] store in $D102
;
LDA #$07 ; Configure the Control Register
; Set bit 0 with '1' - enables IRQB set by transition on CB1
; Set bit 1 with '1' - IRQB set by Low to High transition on CB1
; Set bit 2 with '1' - to select Data Register B on $D102 (#$07 = binary 00000111)
; Set bits 3 to 5 with '0' - bit 5 = 0 configures CB2 (not required here)
; (CB1 pin needs connecting to pull-down resistor to avoid false flag on bit-6)
STA PIAB_Control ; store in $d103
; When /IRQB is triggered, connected to /IRQ on 6502, the 6502 triggers
; an Interrupt Service Routine
; To read Port B data inputs, PB bits 0 - 7, LDA $D102 // PIAB_Data.
; Reading this clears the IRQ set condition on 6821 IRQB
CLI ; Clear / enable interrupts
Main_Loop
NOP
JMP Main_Loop
; Interrupt Service Routine start address - as set by monitor code.
* = $7600
; The only interrupt request comes from 6821 PIA
; Read Port B - 6821
PORT_READ
LDA PIAB_Data ; $D102 - also clears Interrupt Status Flag in Control Register
JSR ACIA0_SendByte ; print it
RTI ; Return from Interrupt
ACIA0_SendByte ; Sends a byte out ACIA 0
; Byte must be in A
; Returns with registers intact
PHA ; Put A on the stack
A0SB_Loop LDA ACIA0_Status ; Get ACIA Status.
AND #$10 ; Is TX buffer full?
BEQ A0SB_Loop ; Yes. Go ask again.
PLA ; No. Restore A
STA ACIA0_Data ; And send the byte out.
RTS